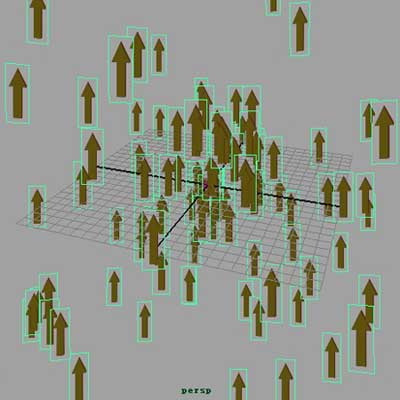
有大量的例子从一个点发射器发出,注意上图中,箭头的方向没有指向它们各自的速度方向,下面就讲讲怎样改变它们
它将要把在摄像机空间里的UP vector转化为世界坐标系里面的
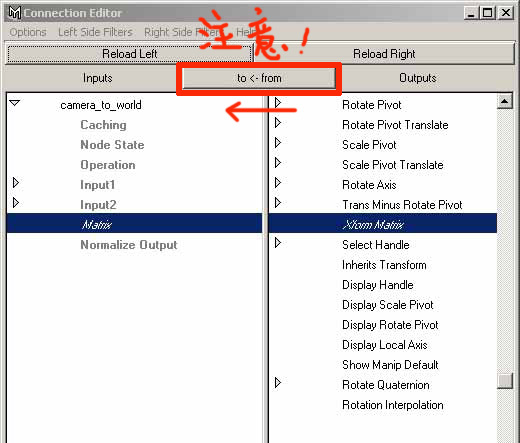
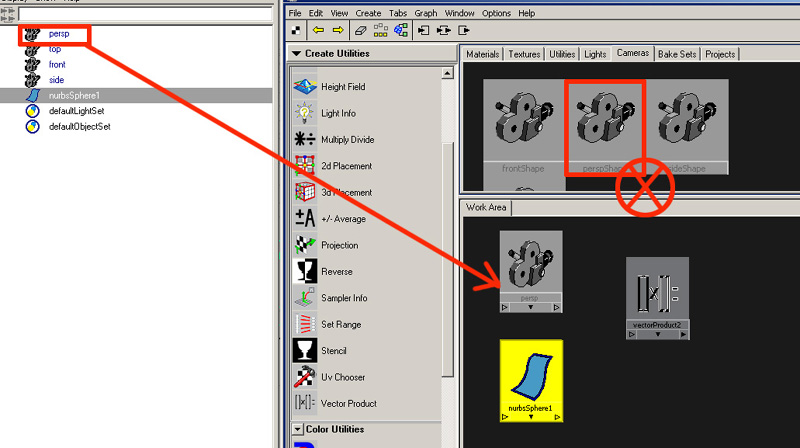
看清上面的连接编辑器的连接方向!(红框标注)
选择outliner里面的persp(透视图摄像机),不要选Hypershade里面的perspShape,要不你找不到 Xform Matrix 这一项
outliner persp
vector $up=<<0,1,0>>;
vector $cameraup=<<camera_to_world.outputX,camera_to_world.outputY,camera_to_world.outputZ>>;
vector $ref = cross($up,$cameraup);
float $ang=acos(dot($up,unit(particleShape1.worldVelocity)))/3.14*180;
if(dot($ref,particleShape1.worldVelocity)>0)
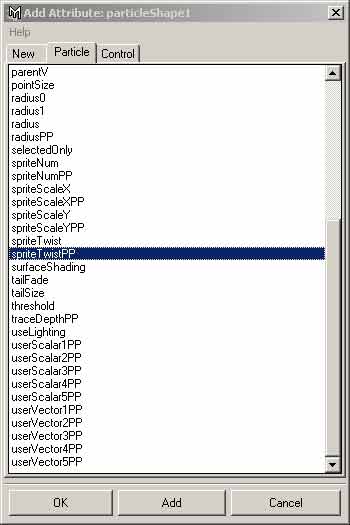
particleShape1.spriteTwistPP=$ang;
else
particleShape1.spriteTwistPP=-$ang;
就可以了
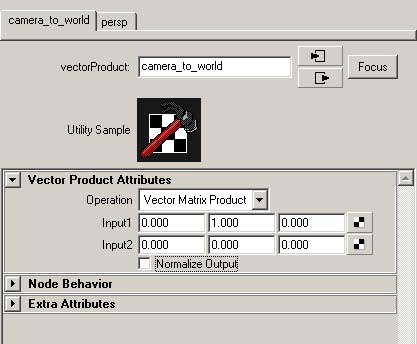
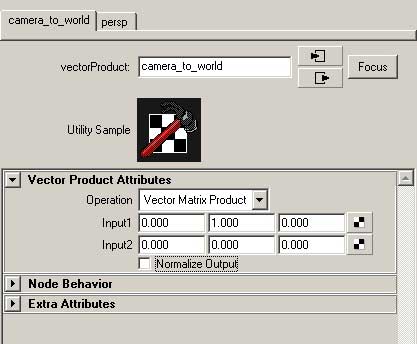
最开始的vector product 节点,把在摄像机空间里的UP vector转化为世界坐标系里面的
maya help里面解释的摄像机得Xform Matrix和 Matrix包含同样的信息
( Contains the same information as the matrix attribute on dagNode but it is stored in a format that can be interpolated easily.——maya help )
vector product 节点得input 1是<<0,1,0>>,就是y轴得方向,这个矢量应该是摄像机坐标系得
通过vector product 节点得Vector Matrix Product运算把 input 1变为世界坐标系
下面试着分析一下这个表达式(如有不对得,请指出,呵呵)
vector $up=<<0,1,0>>;
定义一个矢量
vector $cameraup=<<camera_to_world.outputX,camera_to_world.outputY,camera_to_world.outputZ>>;
再定义一个矢量,分别取刚才vector product 节点算出的output
vector $ref = cross($up,$cameraup);
定义矢量,矢量 $ref 等于$up,$cameraup这两个矢量得差乘
上面定义了三个矢量,下面
float $ang=acos(dot($up,unit(particleShape1.worldVelocity)))/3.14*180;
$ang得到是一个角度,他是$up 和粒子速度(worldVelocity)的一个夹角
dot——点乘,由于$up是一个单位矢量(0,1,0),速度矢量也单位化了(unit),所以点乘得到两个矢量得余弦值——cos X
通过acos,求反余弦,得到角度,也就是夹角
这时候求得的夹角是用弧度制的
所以要转化为角度制——后面的:
/3.14*180
画个图,可能好理解一些!
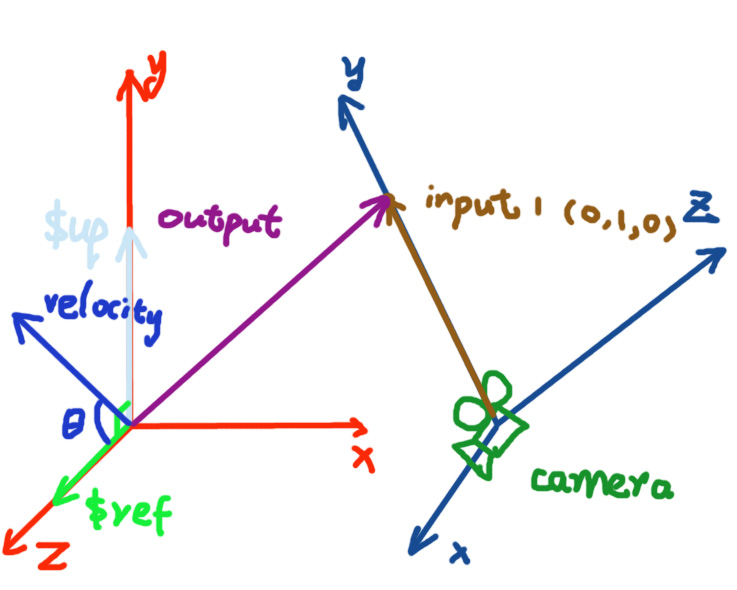
深蓝色的是摄像机坐标系
这里我们的两个坐标系的关系,据了个最简单的:
世界坐标系得xy平面和摄像机坐标系zy平面是共面的,所以世界坐标系z和摄像机坐标系x轴自然平行
棕色的矢量是摄像机坐标系得一个矢量
也就是我们在 vector product 里面的input 1
通过 vector product 的运算,就把input 1转化为了紫色的矢量
这是在世界坐标系得,也就是 vector product 得output
这个output得值赋给了$cameraup
也就是$cameraup等于output了,
矢量$ref是$up点乘$cameraup的结果(就试图中得浅绿色的矢量,哦我这个可能画翻了,应该是z轴向相反的,不好意思,影响不大)
深蓝色得是速度矢量,它和$ref求夹角德余弦cos
因为从y轴顺时针,逆时针旋转相同角度得到的余弦值真好是相反数
来判断spriteTwistPP应该旋转的角度,
这个角度就是变量$ang,只不过是由个角度问题,这个偏向角要和速度方向吻合,也达到最开始我的说的目的了——————箭头的方向指向它们各自的速度方向
完了
呵呵~~~
我都有点晕了
有不对的地方,请大家指出,谢谢